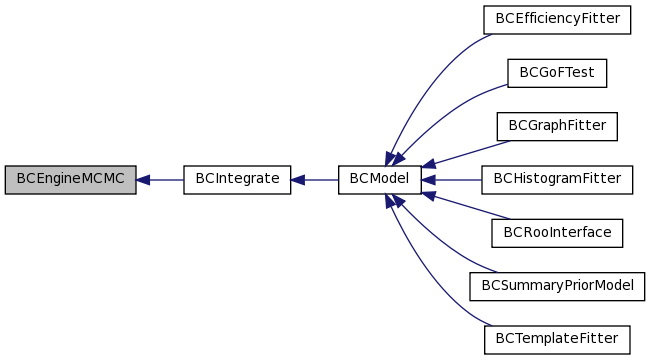
An engine class for Markov Chain Monte Carlo. More...
#include <BCEngineMCMC.h>
Detailed Description
An engine class for Markov Chain Monte Carlo.
- Version:
- 1.0
- Date:
- 08.2008 This class represents an engine class for Markov Chain Monte Carlo (MCMC). One or more chains can be defined simultaneously.
Definition at line 35 of file BCEngineMCMC.h.
Member Typedef Documentation
typedef bool(BCEngineMCMC::* BCEngineMCMC::MCMCPointerToGetProposalPoint)(int chain, std::vector< double > xnew, std::vector< double > xold) const [private] |
Definition at line 547 of file BCEngineMCMC.h.
Member Enumeration Documentation
An enumerator for the status of a test.
Definition at line 44 of file BCEngineMCMC.h.
{ kLow, kMedium, kHigh, kVeryHigh };
Constructor & Destructor Documentation
| BCEngineMCMC::BCEngineMCMC | ( | ) |
Default constructor.
Definition at line 25 of file BCEngineMCMC.cxx.
{
// set default parameters for the mcmc
this->MCMCSetValuesDefault();
// initialize random number generator
fRandom = new TRandom3(0);
}
| BCEngineMCMC::BCEngineMCMC | ( | int | n | ) |
Constructor.
- Parameters:
-
n number of chains
Definition at line 35 of file BCEngineMCMC.cxx.
{
// set number of chains to n
fMCMCNChains = n;
// call default constructor
BCEngineMCMC();
}
| BCEngineMCMC::BCEngineMCMC | ( | const BCEngineMCMC & | enginemcmc | ) |
Default copy constructor.
Definition at line 182 of file BCEngineMCMC.cxx.
{
enginemcmc.Copy(*this);
}
| BCEngineMCMC::~BCEngineMCMC | ( | ) | [virtual] |
Default destructor.
Definition at line 162 of file BCEngineMCMC.cxx.
{
// delete random number generator
if (fRandom)
delete fRandom;
// delete 1-d marginalized distributions
for (int i = 0; i < int(fMCMCH1Marginalized.size()); ++i)
if (fMCMCH1Marginalized[i])
delete fMCMCH1Marginalized[i];
fMCMCH1Marginalized.clear();
// delete 2-d marginalized distributions
for (int i = 0; i < int(fMCMCH2Marginalized.size()); ++i)
if (fMCMCH2Marginalized[i])
delete fMCMCH2Marginalized[i];
fMCMCH2Marginalized.clear();
}
Member Function Documentation
| void BCEngineMCMC::Copy | ( | BCEngineMCMC & | enginemcmc | ) | const [private] |
Definition at line 347 of file BCEngineMCMC.cxx.
{}
| double BCEngineMCMC::LogEval | ( | std::vector< double > | parameters | ) | [virtual] |
Reimplemented in BCIntegrate, and BCModel.
Definition at line 800 of file BCEngineMCMC.cxx.
{
// test function for now
// this will be overloaded by the user
return 0.0;
}
| int BCEngineMCMC::MCMCAddParameter | ( | double | min, | |
| double | max | |||
| ) |
Definition at line 1374 of file BCEngineMCMC.cxx.
{
// add the boundaries to the corresponding vectors
fMCMCBoundaryMin.push_back(min);
fMCMCBoundaryMax.push_back(max);
// set flag for individual parameters
fMCMCFlagsFillHistograms.push_back(true);
// increase the number of parameters by one
fMCMCNParameters++;
// return the number of parameters
return fMCMCNParameters;
}
| virtual void BCEngineMCMC::MCMCCurrentPointInterface | ( | std::vector< double > & | point, | |
| int | ichain, | |||
| bool | accepted | |||
| ) | [inline, virtual] |
Definition at line 534 of file BCEngineMCMC.h.
{};
| int BCEngineMCMC::MCMCGetCurrentChain | ( | ) | [inline] |
- Returns:
- current chain index
Definition at line 106 of file BCEngineMCMC.h.
{ return fMCMCCurrentChain; };
| int BCEngineMCMC::MCMCGetCurrentIteration | ( | ) | [inline] |
- Returns:
- current iterations
Definition at line 101 of file BCEngineMCMC.h.
{ return fMCMCCurrentIteration; };
| int BCEngineMCMC::MCMCGetCycle | ( | ) | [inline] |
Definition at line 201 of file BCEngineMCMC.h.
{ return fMCMCCycle; };
| bool BCEngineMCMC::MCMCGetFlagConvergenceGlobal | ( | ) | [inline] |
Definition at line 117 of file BCEngineMCMC.h.
{ return fMCMCFlagConvergenceGlobal; };
| int BCEngineMCMC::MCMCGetFlagInitialPosition | ( | ) | [inline] |
Definition at line 221 of file BCEngineMCMC.h.
{ return fMCMCFlagInitialPosition; };
| bool BCEngineMCMC::MCMCGetFlagRun | ( | ) | [inline] |
Definition at line 247 of file BCEngineMCMC.h.
{ return fMCMCFlagRun; };
| TH1D * BCEngineMCMC::MCMCGetH1Marginalized | ( | int | i | ) |
Definition at line 197 of file BCEngineMCMC.cxx.
{
// check index
if (index < 0 || index >= int(fMCMCH1Marginalized.size()))
{
BCLog::OutWarning("BCEngineMCMC::MCMCGetH1Marginalized. Index out of range.");
return 0;
}
return fMCMCH1Marginalized[index];
}
| TH2D * BCEngineMCMC::MCMCGetH2Marginalized | ( | int | i, | |
| int | j | |||
| ) |
Definition at line 210 of file BCEngineMCMC.cxx.
{
int counter = 0;
int index = 0;
// search for correct combination
for(int i = 0; i < fMCMCNParameters; i++)
for (int j = 0; j < i; ++j)
{
if(j == index1 && i == index2)
index = counter;
counter++;
}
// check index
if (index < 0 || index >= int(fMCMCH2Marginalized.size()))
{
BCLog::OutWarning("BCEngineMCMC::MCMCGetH2Marginalized. Index out of range.");
return 0;
}
return fMCMCH2Marginalized[index];
}
| std::vector<double> BCEngineMCMC::MCMCGetLogProbx | ( | ) | [inline] |
Definition at line 186 of file BCEngineMCMC.h.
{ return fMCMCprob; };
| double BCEngineMCMC::MCMCGetLogProbx | ( | int | ichain | ) |
Definition at line 435 of file BCEngineMCMC.cxx.
{
// check if ichain is in range
if (ichain < 0 || ichain >= fMCMCNChains)
return -1;
// return log of the probability at the current point in the ith chain
return fMCMCprob.at(ichain);
}
| TTree* BCEngineMCMC::MCMCGetMarkovChainTree | ( | int | i | ) | [inline] |
Definition at line 254 of file BCEngineMCMC.h.
{ return fMCMCTrees.at(i); };
| std::vector<double> BCEngineMCMC::MCMCGetMaximumLogProb | ( | ) | [inline] |
Definition at line 216 of file BCEngineMCMC.h.
{ return fMCMCprobMax; };
| std::vector< double > BCEngineMCMC::MCMCGetMaximumPoint | ( | int | i | ) |
Definition at line 235 of file BCEngineMCMC.cxx.
{
// create a new vector with the lenght of fMCMCNParameters
std::vector <double> x;
// check if i is in range
if (i < 0 || i >= fMCMCNChains)
return x;
// copy the point in the ith chain into the temporary vector
for (int j = 0; j < fMCMCNParameters; ++j)
x.push_back(fMCMCxMax.at(i * fMCMCNParameters + j));
return x;
}
| std::vector<double> BCEngineMCMC::MCMCGetMaximumPoints | ( | ) | [inline] |
Definition at line 206 of file BCEngineMCMC.h.
{ return fMCMCxMax; };
| int BCEngineMCMC::MCMCGetNChains | ( | ) | [inline] |
Definition at line 86 of file BCEngineMCMC.h.
{ return fMCMCNChains; };
| bool BCEngineMCMC::MCMCGetNewPointMetropolis | ( | int | chain = 0 |
) |
Definition at line 555 of file BCEngineMCMC.cxx.
{
// calculate index
int index = chain * fMCMCNParameters;
fMCMCCurrentChain = chain;
// increase counter
fMCMCNIterations[chain]++;
// get proposal point
if (!this->MCMCGetProposalPointMetropolis(chain, fMCMCxLocal))
{
// increase counter
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCNTrialsFalse[chain * fMCMCNParameters + i]++;
// execute user code for every point
MCMCCurrentPointInterface(fMCMCxLocal, chain, false);
return false;
}
// calculate probabilities of the old and new points
double p0 = fMCMCprob[chain];
double p1 = this->LogEval(fMCMCxLocal);
// flag for accept
bool accept = false;
// if the new point is more probable, keep it ...
if (p1 >= p0)
accept = true;
// ... or else throw dice.
else
{
double r = log(fRandom->Rndm());
if(r < p1 - p0)
accept = true;
}
// fill the new point
if(accept)
{
// increase counter
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCNTrialsTrue[chain * fMCMCNParameters + i]++;
// copy the point
for(int i = 0; i < fMCMCNParameters; ++i)
{
// save the point
fMCMCx[index + i] = fMCMCxLocal[i];
// save the probability of the point
fMCMCprob[chain] = p1;
}
}
else
{
// increase counter
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCNTrialsFalse[chain * fMCMCNParameters + i]++;
}
// execute user code for every point
MCMCCurrentPointInterface(fMCMCxLocal, chain, accept);
return accept;
}
| bool BCEngineMCMC::MCMCGetNewPointMetropolis | ( | int | chain, | |
| int | parameter | |||
| ) |
Definition at line 485 of file BCEngineMCMC.cxx.
{
// calculate index
int index = chain * fMCMCNParameters;
fMCMCCurrentChain = chain;
// increase counter
fMCMCNIterations[chain]++;
// get proposal point
if (!this->MCMCGetProposalPointMetropolis(chain, parameter, fMCMCxLocal))
{
// increase counter
fMCMCNTrialsFalse[chain * fMCMCNParameters + parameter]++;
// execute user code for every point
MCMCCurrentPointInterface(fMCMCxLocal, chain, false);
return false;
}
// calculate probabilities of the old and new points
double p0 = fMCMCprob[chain];
double p1 = this->LogEval(fMCMCxLocal);
// flag for accept
bool accept = false;
// if the new point is more probable, keep it ...
if (p1 >= p0)
accept = true;
// ... or else throw dice.
else
{
double r = log(fRandom->Rndm());
if(r < p1 - p0)
accept = true;
}
// fill the new point
if(accept)
{
// increase counter
fMCMCNTrialsTrue[chain * fMCMCNParameters + parameter]++;
// copy the point
for(int i = 0; i < fMCMCNParameters; ++i)
{
// save the point
fMCMCx[index + i] = fMCMCxLocal[i];
// save the probability of the point
fMCMCprob[chain] = p1;
}
}
else
{
// increase counter
fMCMCNTrialsFalse[chain * fMCMCNParameters + parameter]++;
}
// execute user code for every point
MCMCCurrentPointInterface(fMCMCxLocal, chain, accept);
return accept;
}
| std::vector<int> BCEngineMCMC::MCMCGetNIterations | ( | ) | [inline] |
Definition at line 96 of file BCEngineMCMC.h.
{ return fMCMCNIterations; };
| int BCEngineMCMC::MCMCGetNIterationsConvergenceGlobal | ( | ) | [inline] |
Definition at line 112 of file BCEngineMCMC.h.
{ return fMCMCNIterationsConvergenceGlobal; };
| int BCEngineMCMC::MCMCGetNIterationsMax | ( | ) | [inline] |
Definition at line 122 of file BCEngineMCMC.h.
{ return fMCMCNIterationsMax; };
| int BCEngineMCMC::MCMCGetNIterationsRun | ( | ) | [inline] |
Definition at line 127 of file BCEngineMCMC.h.
{ return fMCMCNIterationsRun; };
| int BCEngineMCMC::MCMCGetNLag | ( | ) | [inline] |
Definition at line 91 of file BCEngineMCMC.h.
{ return fMCMCNLag; };
| int BCEngineMCMC::MCMCGetNParameters | ( | ) | [inline] |
Definition at line 81 of file BCEngineMCMC.h.
{ return fMCMCNParameters; };
| std::vector<int> BCEngineMCMC::MCMCGetNTrialsFalse | ( | ) | [inline] |
Definition at line 137 of file BCEngineMCMC.h.
{ return fMCMCNTrialsFalse; };
| std::vector<int> BCEngineMCMC::MCMCGetNTrialsTrue | ( | ) | [inline] |
Definition at line 132 of file BCEngineMCMC.h.
{ return fMCMCNTrialsTrue; };
| int BCEngineMCMC::MCMCGetPhase | ( | ) | [inline] |
Definition at line 196 of file BCEngineMCMC.h.
{ return fMCMCPhase; };
| std::vector<double> BCEngineMCMC::MCMCGetprobMean | ( | ) | [inline] |
Definition at line 143 of file BCEngineMCMC.h.
{ return fMCMCprobMean; };
| bool BCEngineMCMC::MCMCGetProposalPointMetropolis | ( | int | chain, | |
| std::vector< double > & | x | |||
| ) |
Definition at line 446 of file BCEngineMCMC.cxx.
{
// get unscaled random point. this point might not be in the correct volume.
this->MCMCTrialFunction(chain, x);
// get a proposal point from the trial function and scale it
for (int i = 0; i < fMCMCNParameters; ++i)
x[i] = fMCMCx[chain * fMCMCNParameters + i] + x[i] * (fMCMCBoundaryMax.at(i) - fMCMCBoundaryMin.at(i));
// check if the point is in the correct volume.
for (int i = 0; i < fMCMCNParameters; ++i)
if ((x[i] < fMCMCBoundaryMin[i]) || (x[i] > fMCMCBoundaryMax[i]))
return false;
return true;
}
| bool BCEngineMCMC::MCMCGetProposalPointMetropolis | ( | int | chain, | |
| int | parameter, | |||
| std::vector< double > & | x | |||
| ) |
Definition at line 464 of file BCEngineMCMC.cxx.
{
// get unscaled random point in the dimension of the chosen
// parameter. this point might not be in the correct volume.
double proposal = MCMCTrialFunctionSingle(ichain, ipar);
// copy the old point into the new
for (int i = 0; i < fMCMCNParameters; ++i)
x[i] = fMCMCx[ichain * fMCMCNParameters + i];
// modify the parameter under study
x[ipar] += proposal * (fMCMCBoundaryMax[ipar] - fMCMCBoundaryMin[ipar]);
// check if the point is in the correct volume.
if ((x[ipar] < fMCMCBoundaryMin[ipar]) || (x[ipar] > fMCMCBoundaryMax[ipar]))
return false;
return true;
}
| double BCEngineMCMC::MCMCGetRValue | ( | ) | [inline] |
Definition at line 236 of file BCEngineMCMC.h.
{ return fMCMCRValue; };
| double BCEngineMCMC::MCMCGetRValueCriterion | ( | ) | [inline] |
Definition at line 226 of file BCEngineMCMC.h.
{ return fMCMCRValueCriterion; };
| double BCEngineMCMC::MCMCGetRValueParameters | ( | int | i | ) | [inline] |
Definition at line 242 of file BCEngineMCMC.h.
{ return fMCMCRValueParameters.at(i); };
| double BCEngineMCMC::MCMCGetRValueParametersCriterion | ( | ) | [inline] |
Definition at line 231 of file BCEngineMCMC.h.
{ return fMCMCRValueParametersCriterion; };
| TRandom3* BCEngineMCMC::MCMCGetTRandom3 | ( | ) | [inline] |
Definition at line 272 of file BCEngineMCMC.h.
{ return fRandom; };
| std::vector<double> BCEngineMCMC::MCMCGetTrialFunctionScaleFactor | ( | ) | [inline] |
Definition at line 154 of file BCEngineMCMC.h.
{ return fMCMCTrialFunctionScaleFactor; };
| std::vector< double > BCEngineMCMC::MCMCGetTrialFunctionScaleFactor | ( | int | ichain | ) |
Definition at line 371 of file BCEngineMCMC.cxx.
{
// create a new vector with the length of fMCMCNParameters
std::vector <double> x;
// check if ichain is in range
if (ichain < 0 || ichain >= fMCMCNChains)
return x;
// copy the scale factors into the temporary vector
for (int j = 0; j < fMCMCNParameters; ++j)
x.push_back(fMCMCTrialFunctionScaleFactor.at(ichain * fMCMCNParameters + j));
return x;
}
| double BCEngineMCMC::MCMCGetTrialFunctionScaleFactor | ( | int | ichain, | |
| int | ipar | |||
| ) |
Definition at line 388 of file BCEngineMCMC.cxx.
{
// check if ichain is in range
if (ichain < 0 || ichain >= fMCMCNChains)
return 0;
// check if ipar is in range
if (ipar < 0 || ipar >= fMCMCNParameters)
return 0;
// return component of ipar point in the ichain chain
return fMCMCTrialFunctionScaleFactor.at(ichain * fMCMCNChains + ipar);
}
| std::vector<double> BCEngineMCMC::MCMCGetVariance | ( | ) | [inline] |
Definition at line 149 of file BCEngineMCMC.h.
{ return fMCMCprobVar; };
| std::vector<double> BCEngineMCMC::MCMCGetx | ( | ) | [inline] |
Definition at line 170 of file BCEngineMCMC.h.
{ return fMCMCx; };
| std::vector< double > BCEngineMCMC::MCMCGetx | ( | int | ichain | ) |
Definition at line 403 of file BCEngineMCMC.cxx.
{
// create a new vector with the length of fMCMCNParameters
std::vector <double> x;
// check if ichain is in range
if (ichain < 0 || ichain >= fMCMCNChains)
return x;
// copy the point in the ichain chain into the temporary vector
for (int j = 0; j < fMCMCNParameters; ++j)
x.push_back(fMCMCx.at(ichain * fMCMCNParameters + j));
return x;
}
| double BCEngineMCMC::MCMCGetx | ( | int | ichain, | |
| int | ipar | |||
| ) |
Definition at line 420 of file BCEngineMCMC.cxx.
{
// check if ichain is in range
if (ichain < 0 || ichain >= fMCMCNChains)
return 0;
// check if ipar is in range
if (ipar < 0 || ipar >= fMCMCNParameters)
return 0;
// return component of jth point in the ith chain
return fMCMCx.at(ichain * fMCMCNParameters + ipar);
}
| void BCEngineMCMC::MCMCInChainCheckMaximum | ( | ) |
Definition at line 629 of file BCEngineMCMC.cxx.
{
// loop over all chains
for (int i = 0; i < fMCMCNChains; ++i)
{
// check if new maximum is found or chain is at the beginning
if (fMCMCprob[i] > fMCMCprobMax[i] || fMCMCNIterations[i] == 1)
{
// copy maximum value
fMCMCprobMax[i] = fMCMCprob[i];
// copy mode of chain
for (int j = 0; j < fMCMCNParameters; ++j)
fMCMCxMax[i * fMCMCNParameters + j] = fMCMCx[i * fMCMCNParameters + j];
}
}
}
| void BCEngineMCMC::MCMCInChainFillHistograms | ( | ) |
Definition at line 681 of file BCEngineMCMC.cxx.
{
// check if histograms are supposed to be filled
if (!fMCMCFlagFillHistograms)
return;
// loop over chains
for (int i = 0; i < fMCMCNChains; ++i)
{
// fill each 1-dimensional histogram (if supposed to be filled)
for (int j = 0; j < fMCMCNParameters; ++j)
if (fMCMCFlagsFillHistograms.at(j))
fMCMCH1Marginalized[j]->Fill(fMCMCx[i * fMCMCNParameters + j]);
// fill each 2-dimensional histogram (if supposed to be filled)
int counter = 0;
for (int j = 0; j < fMCMCNParameters; ++j)
for (int k = 0; k < j; ++k)
{
if (fMCMCFlagsFillHistograms.at(j) && fMCMCFlagsFillHistograms.at(k))
fMCMCH2Marginalized[counter]->Fill(fMCMCx[i*fMCMCNParameters+k],fMCMCx[i* fMCMCNParameters+j]);
counter ++;
}
}
}
| void BCEngineMCMC::MCMCInChainTestConvergenceAllChains | ( | ) |
Definition at line 709 of file BCEngineMCMC.cxx.
{
// calculate number of entries in this part of the chain
int npoints = fMCMCNTrialsTrue[0] + fMCMCNTrialsFalse[0];
if (fMCMCNChains > 1 && npoints > 1)
{
// define flag for convergence
bool flag_convergence = true;
// loop over parameters
for (int iparameters = 0; iparameters < fMCMCNParameters; ++iparameters)
{
double sum = 0;
double sum2 = 0;
double sumv = 0;
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains) {
// get parameter index
int index = ichains * fMCMCNParameters + iparameters;
// add to sums
sum += fMCMCxMean[index];
sum2 += fMCMCxMean[index] * fMCMCxMean[index];
sumv += fMCMCxVar[index];
}
// calculate r-value for each parameter
double mean = sum / double(fMCMCNChains);
double B = (sum2 / double(fMCMCNChains) - mean * mean) * double(fMCMCNChains) / double(fMCMCNChains-1) * double(npoints);
double W = sumv * double(npoints) / double(npoints - 1) / double(fMCMCNChains);
double r = 100.0;
// check denominator and convergence
if (W > 0) {
r = sqrt( ( (1-1/double(npoints)) * W + 1/double(npoints) * B ) / W);
fMCMCRValueParameters[iparameters] = r;
// set flag to false if convergence criterion is not fulfilled for the parameter
if (! ((fMCMCRValueParameters[iparameters]-1.0) < fMCMCRValueParametersCriterion))
flag_convergence = false;
}
// else: leave convergence flag true for that parameter
}
// convergence criterion applied on the log-likelihood
double sum = 0;
double sum2 = 0;
double sumv = 0;
// loop over chains
for (int i = 0; i < fMCMCNChains; ++i)
{
sum += fMCMCprobMean[i];
sum2 += fMCMCprobMean[i] * fMCMCprobMean[i]; ;
sumv += fMCMCprobVar[i];
}
// calculate r-value for log-likelihood
double mean = sum / double(fMCMCNChains);
double B = (sum2 / double(fMCMCNChains) - mean * mean) * double(fMCMCNChains) / double(fMCMCNChains-1) * double(npoints);
double W = sumv * double(npoints) / double(npoints - 1) / double(fMCMCNChains);
double r = 100.0;
if (W > 0)
{
r = sqrt( ( (1-1/double(npoints)) * W + 1/double(npoints) * B ) / W);
fMCMCRValue = r;
// set flag to false if convergence criterion is not fulfilled for the log-likelihood
if (! ((fMCMCRValue-1.0) < fMCMCRValueCriterion))
flag_convergence = false;
}
// else: leave convergence flag true for the posterior
// remember number of iterations needed to converge
if (fMCMCNIterationsConvergenceGlobal == -1 && flag_convergence == true)
fMCMCNIterationsConvergenceGlobal = fMCMCNIterations[0] / fMCMCNParameters;
}
}
| void BCEngineMCMC::MCMCInChainUpdateStatistics | ( | ) |
Definition at line 648 of file BCEngineMCMC.cxx.
{
// calculate number of entries in this part of the chain
int npoints = fMCMCNTrialsTrue[0] + fMCMCNTrialsFalse[0];
// length of vectors
int nentries = fMCMCNParameters * fMCMCNChains;
// loop over all parameters of all chains
for (int i = 0; i < nentries; ++i) {
// calculate mean value of each parameter in the chain for this part
fMCMCxMean[i] += (fMCMCx[i] - fMCMCxMean[i]) / double(npoints);
// calculate variance of each chain for this part
if (npoints > 1)
fMCMCxVar[i] = (1.0 - 1./double(npoints)) * fMCMCxVar[i]
+ (fMCMCx[i] - fMCMCxMean[i]) * (fMCMCx[i] - fMCMCxMean[i]) / double(npoints - 1);
}
// loop over chains
for (int i = 0; i < fMCMCNChains; ++i) {
// calculate mean value of each chain for this part
fMCMCprobMean[i] += (fMCMCprob[i] - fMCMCprobMean[i]) / double(npoints);
// calculate variance of each chain for this part
if (npoints > 1)
fMCMCprobVar[i] = (1.0 - 1/double(npoints)) * fMCMCprobVar[i]
+ (fMCMCprob[i] - fMCMCprobMean[i]) * (fMCMCprob[i] - fMCMCprobMean[i]) / double(npoints - 1);
}
}
| void BCEngineMCMC::MCMCInChainWriteChains | ( | ) |
Definition at line 792 of file BCEngineMCMC.cxx.
{
// loop over all chains
for (int i = 0; i < fMCMCNChains; ++i)
fMCMCTrees[i]->Fill();
}
| int BCEngineMCMC::MCMCInitialize | ( | ) |
Definition at line 1448 of file BCEngineMCMC.cxx.
{
// reset values
MCMCResetResults();
// free memory for vectors
fMCMCNIterations.assign(fMCMCNChains, 0);
fMCMCprobMean.assign(fMCMCNChains, 0);
fMCMCprobVar.assign(fMCMCNChains, 0);
fMCMCprob.assign(fMCMCNChains, -1.0);
fMCMCprobMax.assign(fMCMCNChains, -1.0);
fMCMCNTrialsTrue.assign(fMCMCNChains * fMCMCNParameters, 0);
fMCMCNTrialsFalse.assign(fMCMCNChains * fMCMCNParameters, 0);
fMCMCxMax.assign(fMCMCNChains * fMCMCNParameters, 0.);
fMCMCxMean.assign(fMCMCNChains * fMCMCNParameters, 0);
fMCMCxVar.assign(fMCMCNChains * fMCMCNParameters, 0);
fMCMCRValueParameters.assign(fMCMCNParameters, 0.);
if (fMCMCTrialFunctionScaleFactorStart.size() == 0)
fMCMCTrialFunctionScaleFactor.assign(fMCMCNChains * fMCMCNParameters, 1.0);
else
for (int i = 0; i < fMCMCNChains; ++i)
for (int j = 0; j < fMCMCNParameters; ++j)
fMCMCTrialFunctionScaleFactor.push_back(fMCMCTrialFunctionScaleFactorStart.at(j));
// set initial position
if (fMCMCFlagInitialPosition == 2) // user defined points
{
// define flag
bool flag = true;
// check the length of the array of initial positions
if (int(fMCMCInitialPosition.size()) != (fMCMCNChains * fMCMCNParameters))
{
BCLog::OutError("BCEngine::MCMCInitialize : Length of vector containing initial positions does not have required length.");
flag = false;
}
// check the boundaries
if (flag)
{
for (int j = 0; j < fMCMCNChains; ++j)
for (int i = 0; i < fMCMCNParameters; ++i)
if (fMCMCInitialPosition[j * fMCMCNParameters + i] < fMCMCBoundaryMin[i] ||
fMCMCInitialPosition[j * fMCMCNParameters + i] > fMCMCBoundaryMax[i])
{
BCLog::OutError("BCEngine::MCMCInitialize : Initial position out of boundaries.");
flag = false;
}
}
// check flag
if (!flag)
fMCMCFlagInitialPosition = 1;
}
if (fMCMCFlagInitialPosition == 0) // center of the interval
for (int j = 0; j < fMCMCNChains; ++j)
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCx.push_back(fMCMCBoundaryMin[i] + .5 * (fMCMCBoundaryMax[i] - fMCMCBoundaryMin[i]));
else if (fMCMCFlagInitialPosition == 2) // user defined
{
for (int j = 0; j < fMCMCNChains; ++j)
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCx.push_back(fMCMCInitialPosition.at(j * fMCMCNParameters + i));
}
else
for (int j = 0; j < fMCMCNChains; ++j) // random number (default)
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCx.push_back(fMCMCBoundaryMin[i] + fRandom->Rndm() * (fMCMCBoundaryMax[i] - fMCMCBoundaryMin[i]));
// copy the point of the first chain
fMCMCxLocal.clear();
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCxLocal.push_back(fMCMCx[i]);
// define 1-dimensional histograms for marginalization
for(int i = 0; i < fMCMCNParameters; ++i)
{
TH1D * h1 = 0;
if (fMCMCFlagsFillHistograms.at(i))
h1 = new TH1D(TString::Format("h1_%d_parameter_%i", BCLog::GetHIndex() ,i), "",
fMCMCH1NBins[i], fMCMCBoundaryMin[i], fMCMCBoundaryMax[i]);
fMCMCH1Marginalized.push_back(h1);
}
for(int i = 0; i < fMCMCNParameters; ++i)
for (int k = 0; k < i; ++k)
{
TH2D * h2 = 0;
if (fMCMCFlagsFillHistograms.at(i) && fMCMCFlagsFillHistograms.at(k))
h2 = new TH2D(Form("h2_%d_parameters_%i_vs_%i", BCLog::GetHIndex(), i, k), "",
fMCMCH1NBins[k], fMCMCBoundaryMin[k], fMCMCBoundaryMax[k],
fMCMCH1NBins[i], fMCMCBoundaryMin[i], fMCMCBoundaryMax[i] );
fMCMCH2Marginalized.push_back(h2);
}
return 1;
}
| void BCEngineMCMC::MCMCInitializeMarkovChains | ( | ) |
Definition at line 1391 of file BCEngineMCMC.cxx.
{
// evaluate function at the starting point
std::vector <double> x0;
for (int j = 0; j < fMCMCNChains; ++j)
{
x0.clear();
for (int i = 0; i < fMCMCNParameters; ++i)
x0.push_back(fMCMCx[j * fMCMCNParameters + i]);
fMCMCprob[j] = this->LogEval(x0);
}
x0.clear();
}
| void BCEngineMCMC::MCMCInitializeMarkovChainTrees | ( | ) |
Definition at line 325 of file BCEngineMCMC.cxx.
{
// clear vector
fMCMCTrees.clear();
// create new trees
for (int i = 0; i < fMCMCNChains; ++i) {
fMCMCTrees.push_back(new TTree(TString::Format("MarkovChainTree_%i", i), "MarkovChainTree"));
fMCMCTrees[i]->Branch("Iteration", &fMCMCNIterations[i], "iteration/I");
fMCMCTrees[i]->Branch("NParameters", &fMCMCNParameters, "parameters/I");
fMCMCTrees[i]->Branch("LogProbability", &fMCMCprob[i], "log(probability)/D");
fMCMCTrees[i]->Branch("Phase", &fMCMCPhase, "phase/I");
fMCMCTrees[i]->Branch("Cycle", &fMCMCCycle, "cycle/I");
for (int j = 0; j < fMCMCNParameters; ++j)
fMCMCTrees[i]->Branch(TString::Format("Parameter%i", j),
&fMCMCx[i * fMCMCNParameters + j],
TString::Format("parameter %i/D", j));
}
}
| virtual void BCEngineMCMC::MCMCIterationInterface | ( | ) | [inline, virtual] |
| int BCEngineMCMC::MCMCMetropolis | ( | ) |
Definition at line 1199 of file BCEngineMCMC.cxx.
{
// check if prerun has been performed
if (!fMCMCFlagPreRun)
this->MCMCMetropolisPreRun();
// print to screen
BCLog::OutSummary( "Run Metropolis MCMC...");
// reset run statistics
this->MCMCResetRunStatistics();
// set phase and cycle number
fMCMCPhase = 2;
fMCMCCycle = 0;
// perform run
BCLog::OutSummary(Form(" --> Perform MCMC run with %i chains, each with %i iterations.", fMCMCNChains, fMCMCNIterationsRun));
// int counterupdate = 0;
// bool convergence = false;
// bool flagefficiency = false;
// std::vector <double> efficiency;
// for (int i = 0; i < fMCMCNParameters; ++i)
// for (int j = 0; j < fMCMCNChains; ++j)
// efficiency.push_back(0.0);
int nwrite = fMCMCNIterationsRun/10;
if(nwrite < 100)
nwrite=100;
else if(nwrite < 500)
nwrite=1000;
else if(nwrite < 10000)
nwrite=1000;
else
nwrite=10000;
// start the run
for (fMCMCCurrentIteration = 1; fMCMCCurrentIteration <= fMCMCNIterationsRun; ++fMCMCCurrentIteration)
{
if ( (fMCMCCurrentIteration)%nwrite == 0 )
BCLog::OutDetail(Form(" --> iteration number %i (%.2f%%)", fMCMCCurrentIteration, (double)(fMCMCCurrentIteration)/(double)fMCMCNIterationsRun*100.));
// if the flag is set then run over the parameters one after the other.
if (fMCMCFlagOrderParameters)
{
// loop over parameters
for (int iparameters = 0; iparameters < fMCMCNParameters; ++iparameters)
{
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains)
this->MCMCGetNewPointMetropolis(ichains, iparameters);
// reset current chain
fMCMCCurrentChain = -1;
// update search for maximum
this->MCMCInChainCheckMaximum();
} // end loop over all parameters
// check if the current iteration is consistent with the lag
if ( fMCMCCurrentIteration % fMCMCNLag == 0)
{
// fill histograms
this->MCMCInChainFillHistograms();
// write chain to file
if (fMCMCFlagWriteChainToFile)
this->MCMCInChainWriteChains();
// do anything interface
this->MCMCIterationInterface();
}
}
// if the flag is not set then run over the parameters at the same time.
else
{
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains)
// get new point
this->MCMCGetNewPointMetropolis(ichains);
// reset current chain
fMCMCCurrentChain = -1;
// update search for maximum
this->MCMCInChainCheckMaximum();
// check if the current iteration is consistent with the lag
if (fMCMCCurrentIteration % fMCMCNLag == 0)
{
// fill histograms
this->MCMCInChainFillHistograms();
// write chain to file
if (fMCMCFlagWriteChainToFile)
this->MCMCInChainWriteChains();
// do anything interface
this->MCMCIterationInterface();
}
}
} // end run
// print convergence status
BCLog::OutSummary(Form(" --> Markov chains ran for %i iterations.", fMCMCNIterationsRun));
// print modes
// find global maximum
double probmax = fMCMCprobMax.at(0);
int probmaxindex = 0;
// loop over all chains and find the maximum point
for (int i = 1; i < fMCMCNChains; ++i)
if (fMCMCprobMax.at(i) > probmax)
{
probmax = fMCMCprobMax.at(i);
probmaxindex = i;
}
BCLog::OutDetail(" --> Global mode from MCMC:");
int ndigits = (int) log10(fMCMCNParameters);
for (int i = 0; i < fMCMCNParameters; ++i)
BCLog::OutDetail(Form( TString::Format(" --> parameter %%%di: %%.4g", ndigits+1),
i, fMCMCxMax[probmaxindex * fMCMCNParameters + i]));
// reset coutner
fMCMCCurrentIteration = -1;
// reset current chain
fMCMCCurrentChain = -1;
// set flags
// fMCMCFlagPreRun = false;
fMCMCFlagRun = true;
return 1;
}
| int BCEngineMCMC::MCMCMetropolisPreRun | ( | ) |
Definition at line 808 of file BCEngineMCMC.cxx.
{
// print on screen
BCLog::OutSummary("Pre-run Metropolis MCMC...");
// initialize Markov chain
this->MCMCInitialize();
this->MCMCInitializeMarkovChains();
// helper variable containing number of digits in the number of parameters
int ndigits = (int)log10(fMCMCNParameters) +1;
if(ndigits<4)
ndigits=4;
// reset run statistics
this->MCMCResetRunStatistics();
fMCMCNIterationsConvergenceGlobal = -1;
// perform run
BCLog::OutSummary(Form(" --> Perform MCMC pre-run with %i chains, each with maximum %i iterations", fMCMCNChains, fMCMCNIterationsMax));
// don't write to file during pre run
bool tempflag_writetofile = fMCMCFlagWriteChainToFile;
fMCMCFlagWriteChainToFile = false;
// initialize counter variables and flags
fMCMCCurrentIteration = 1; // counts the number of iterations
int counterupdate = 1; // after how many iterations is an update needed?
bool convergence = false; // convergence reached?
bool flagefficiency = false; // efficiency reached?
// array of efficiencies
std::vector <double> efficiency;
efficiency.assign(fMCMCNParameters * fMCMCNChains, 0.0);
// how often to check convergence and efficiencies?
// it's either every fMCMCNParameters*nMCMCNIterationsUpdate (for 5 parameters the default would be 5000)
// or it's fMCMCNIterationsUpdateMax (10000 by default)
// whichever of the two is smaller
int updateLimit = ( fMCMCNIterationsUpdateMax<fMCMCNIterationsUpdate*(fMCMCNParameters) && fMCMCNIterationsUpdateMax>0 ) ?
fMCMCNIterationsUpdateMax : fMCMCNIterationsUpdate*(fMCMCNParameters);
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains) {
// loop over parameters
for (int iparameter = 0; iparameter < fMCMCNParameters; ++iparameter){
// global index of the parameter (throughout all the chains)
int index = ichains * fMCMCNParameters + iparameter;
// reset counters
fMCMCNTrialsTrue[index] = 0;
fMCMCNTrialsFalse[index] = 0;
fMCMCxMean[index] = fMCMCx[index];
fMCMCxVar[index] = 0;
}
fMCMCprobMean[ichains] = fMCMCprob[ichains];
fMCMCprobVar[ichains] = 0;
}
// set phase and cycle number
fMCMCPhase = 1;
fMCMCCycle = 0;
// run chain ...
// (a) for at least a minimum number of iterations,
// (b) until a maximum number of iterations is reached,
// (c) or until convergence is reached and the efficiency is in the
// specified region
while (fMCMCCurrentIteration < fMCMCNIterationsPreRunMin || (fMCMCCurrentIteration < fMCMCNIterationsMax && !(convergence && flagefficiency)))
{
//-------------------------------------------
// reset flags and counters
//-------------------------------------------
// set convergence to false by default
convergence = false;
// set number of iterations needed to converge to negative
fMCMCNIterationsConvergenceGlobal = -1;
//-------------------------------------------
// get new point in n-dim space
//-------------------------------------------
// if the flag is set then run over the parameters one after the other.
if (fMCMCFlagOrderParameters)
{
// loop over parameters
for (int iparameters = 0; iparameters < fMCMCNParameters; ++iparameters)
{
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains)
this->MCMCGetNewPointMetropolis(ichains, iparameters);
// search for global maximum
this->MCMCInChainCheckMaximum();
}
}
// if the flag is not set then run over the parameters at the same time.
else
{
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains)
// get new point
this->MCMCGetNewPointMetropolis(ichains);
// search for global maximum
this->MCMCInChainCheckMaximum();
}
//-------------------------------------------
// print out message to log
//-------------------------------------------
// progress printout
if ( fMCMCCurrentIteration > 0 && fMCMCCurrentIteration % fMCMCNIterationsUpdate == 0 )
BCLog::OutDetail(Form(" --> Iteration %i", fMCMCNIterations[0]/fMCMCNParameters));
//-------------------------------------------
// update statistics
//-------------------------------------------
if (counterupdate > 1)
MCMCInChainUpdateStatistics();
//-------------------------------------------
// update scale factors and check convergence
//-------------------------------------------
// debugKK
// check if this line makes sense
if ( counterupdate % updateLimit == 0 && counterupdate > 0 && fMCMCCurrentIteration >= fMCMCNIterationsPreRunMin)
// if ( fMCMCCurrentIteration % fMCMCNIterationsUpdate == 0 && counterupdate > 1 && fMCMCCurrentIteration >= fMCMCNIterationsPreRunMin)
{
// -----------------------------
// reset flags and counters
// -----------------------------
bool rvalues_ok = true;
static bool has_converged = false;
// reset the number of iterations needed for convergence to
// negative
fMCMCNIterationsConvergenceGlobal = -1;
// -----------------------------
// check convergence status
// -----------------------------
// test convergence
this->MCMCInChainTestConvergenceAllChains();
// set convergence flag
if (fMCMCNIterationsConvergenceGlobal > 0)
convergence = true;
// print convergence status:
if (convergence && fMCMCNChains > 1)
BCLog::OutDetail(Form(" * Convergence status: Set of %i Markov chains converged within %i iterations.", fMCMCNChains, fMCMCNIterationsConvergenceGlobal));
else if (!convergence && fMCMCNChains > 1)
{
BCLog::OutDetail(Form(" * Convergence status: Set of %i Markov chains did not converge after %i iterations.", fMCMCNChains, fMCMCCurrentIteration));
BCLog::OutDetail(" - R-Values:");
for (int iparameter = 0; iparameter < fMCMCNParameters; ++iparameter)
{
if(fabs(fMCMCRValueParameters[iparameter]-1.) < fMCMCRValueParametersCriterion)
BCLog::OutDetail(Form( TString::Format(" parameter %%%di : %%.06f",ndigits), iparameter, fMCMCRValueParameters.at(iparameter)));
else
{
BCLog::OutDetail(Form( TString::Format(" parameter %%%di : %%.06f <--",ndigits), iparameter, fMCMCRValueParameters.at(iparameter)));
rvalues_ok = false;
}
}
if(fabs(fMCMCRValue-1.) < fMCMCRValueCriterion)
BCLog::OutDetail(Form(" log-likelihood : %.06f", fMCMCRValue));
else
{
BCLog::OutDetail(Form(" log-likelihood : %.06f <--", fMCMCRValue));
rvalues_ok = false;
}
}
// set convergence flag
if(!has_converged)
if(rvalues_ok)
has_converged = true;
// -----------------------------
// check efficiency status
// -----------------------------
// set flag
flagefficiency = true;
bool flagprintefficiency = true;
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains)
{
// loop over parameters
for (int iparameter = 0; iparameter < fMCMCNParameters; ++iparameter)
{
// global index of the parameter (throughout all the chains)
int index = ichains * fMCMCNParameters + iparameter;
// calculate efficiency
efficiency[index] = double(fMCMCNTrialsTrue[index]) / double(fMCMCNTrialsTrue[index] + fMCMCNTrialsFalse[index]);
// adjust scale factors if efficiency is too low
if (efficiency[index] < fMCMCEfficiencyMin && fMCMCTrialFunctionScaleFactor[index] > .01)
{
if (flagprintefficiency)
{
BCLog::OutDetail(Form(" * Efficiency status: Efficiencies not within pre-defined range."));
BCLog::OutDetail(Form(" - Efficiencies:"));
flagprintefficiency = false;
}
double fscale=2.;
if(has_converged && fMCMCEfficiencyMin/efficiency[index] > 2.)
fscale = 4.;
fMCMCTrialFunctionScaleFactor[index] /= fscale;
BCLog::OutDetail(Form(" Efficiency of parameter %i dropped below %.2lf%% (eps = %.2lf%%) in chain %i. Set scale to %.4g",
iparameter, 100. * fMCMCEfficiencyMin, 100. * efficiency[index], ichains, fMCMCTrialFunctionScaleFactor[index]));
}
// adjust scale factors if efficiency is too high
else if (efficiency[index] > fMCMCEfficiencyMax && fMCMCTrialFunctionScaleFactor[index] < 1.0)
{
if (flagprintefficiency)
{
BCLog::OutDetail(Form(" * Efficiency status: Efficiencies not within pre-defined ranges."));
BCLog::OutDetail(Form(" - Efficiencies:"));
flagprintefficiency = false;
}
fMCMCTrialFunctionScaleFactor[index] *= 2.;
BCLog::OutDetail(Form(" Efficiency of parameter %i above %.2lf%% (eps = %.2lf%%) in chain %i. Set scale to %.4g",
iparameter, 100.0 * fMCMCEfficiencyMax, 100.0 * efficiency[index], ichains, fMCMCTrialFunctionScaleFactor[index]));
}
// check flag
if ((efficiency[index] < fMCMCEfficiencyMin && fMCMCTrialFunctionScaleFactor[index] > .01)
|| (efficiency[index] > fMCMCEfficiencyMax && fMCMCTrialFunctionScaleFactor[index] < 1.))
flagefficiency = false;
} // end of running over all parameters
} // end of running over all chains
// print to screen
if (flagefficiency)
BCLog::OutDetail(Form(" * Efficiency status: Efficiencies within pre-defined ranges."));
// -----------------------------
// reset counters
// -----------------------------
counterupdate = 0;
// loop over chains
for (int ichains = 0; ichains < fMCMCNChains; ++ichains) {
// loop over parameters
for (int iparameter = 0; iparameter < fMCMCNParameters; ++iparameter){
// global index of the parameter (throughout all the chains)
int index = ichains * fMCMCNParameters + iparameter;
// reset counters
fMCMCNTrialsTrue[index] = 0;
fMCMCNTrialsFalse[index] = 0;
fMCMCxMean[index] = fMCMCx[index];
fMCMCxVar[index] = 0;
}
fMCMCprobMean[ichains] = fMCMCprob[ichains];
fMCMCprobVar[ichains] = 0;
}
} // end if update scale factors and check convergence
//-------------------------------------------
// write chain to file
//-------------------------------------------
// write chain to file
if (fMCMCFlagWritePreRunToFile)
this->MCMCInChainWriteChains();
//-------------------------------------------
// increase counters
//-------------------------------------------
if (counterupdate == 0 && fMCMCCurrentIteration > 1)
fMCMCCycle++;
fMCMCCurrentIteration++;
counterupdate++;
} // end of running
// decrease counter by one since it didn't really run that long
// fMCMCCurrentIteration--;
// counterupdate--;
// did we check convergence at least once ?
if (fMCMCCurrentIteration<updateLimit)
{
BCLog::OutWarning(" Convergence never checked !");
BCLog::OutWarning(" Increase maximum number of iterations in the pre-run /MCMCSetNIterationsMax()/");
BCLog::OutWarning(" or decrease maximum number of iterations for update /MCMCSetNIterationsUpdateMax()/");
}
// ---------------
// after chain run
// ---------------
// define convergence status
if (fMCMCNIterationsConvergenceGlobal > 0)
fMCMCFlagConvergenceGlobal = true;
else
fMCMCFlagConvergenceGlobal = false;
// print convergence status
if (fMCMCFlagConvergenceGlobal && fMCMCNChains > 1 && !flagefficiency)
BCLog::OutSummary(Form(" --> Set of %i Markov chains converged within %i iterations but could not adjust scales.", fMCMCNChains, fMCMCNIterationsConvergenceGlobal));
else if (fMCMCFlagConvergenceGlobal && fMCMCNChains > 1 && flagefficiency)
BCLog::OutSummary(Form(" --> Set of %i Markov chains converged within %i iterations and all scales are adjusted.", fMCMCNChains, fMCMCNIterationsConvergenceGlobal));
else if (!fMCMCFlagConvergenceGlobal && (fMCMCNChains > 1) && flagefficiency)
BCLog::OutSummary(Form(" --> Set of %i Markov chains did not converge within %i iterations.", fMCMCNChains, fMCMCNIterationsMax));
else if (!fMCMCFlagConvergenceGlobal && (fMCMCNChains > 1) && !flagefficiency)
BCLog::OutSummary(Form(" --> Set of %i Markov chains did not converge within %i iterations and could not adjust scales.", fMCMCNChains, fMCMCNIterationsMax));
else if(fMCMCNChains == 1)
BCLog::OutSummary(" --> No convergence criterion for a single chain defined.");
else
BCLog::OutSummary(" --> Only one Markov chain. No global convergence criterion defined.");
BCLog::OutSummary(Form(" --> Markov chains ran for %i iterations.", fMCMCCurrentIteration));
// print efficiencies
std::vector <double> efficiencies;
for (int i = 0; i < fMCMCNParameters; ++i)
efficiencies.push_back(0.);
BCLog::OutDetail(" --> Average efficiencies:");
for (int i = 0; i < fMCMCNParameters; ++i)
{
for (int j = 0; j < fMCMCNChains; ++j)
efficiencies[i] += efficiency[j * fMCMCNParameters + i] / double(fMCMCNChains);
BCLog::OutDetail(Form(TString::Format(" --> parameter %%%di : %%.02f%%%%",ndigits), i, 100. * efficiencies[i]));
}
// print scale factors
std::vector <double> scalefactors;
for (int i = 0; i < fMCMCNParameters; ++i)
scalefactors.push_back(0.0);
BCLog::OutDetail(" --> Average scale factors:");
for (int i = 0; i < fMCMCNParameters; ++i)
{
for (int j = 0; j < fMCMCNChains; ++j)
scalefactors[i] += fMCMCTrialFunctionScaleFactor[j * fMCMCNParameters + i] / double(fMCMCNChains);
BCLog::OutDetail(Form( TString::Format(" --> parameter %%%di : %%.02f%%%%",ndigits), i, 100. * scalefactors[i]));
}
// reset flag
fMCMCFlagWriteChainToFile = tempflag_writetofile;
// set pre-run flag
fMCMCFlagPreRun = true;
// reset current iteration
fMCMCCurrentIteration = -1;
// reset current chain
fMCMCCurrentChain = -1;
// no error
return 1;
}
| int BCEngineMCMC::MCMCResetResults | ( | ) |
Definition at line 1408 of file BCEngineMCMC.cxx.
{
// reset variables
fMCMCNIterations.clear();
fMCMCNTrialsTrue.clear();
fMCMCNTrialsFalse.clear();
fMCMCTrialFunctionScaleFactor.clear();
fMCMCprobMean.clear();
fMCMCprobVar.clear();
fMCMCxMean.clear();
fMCMCxVar.clear();
fMCMCx.clear();
fMCMCprob.clear();
fMCMCxMax.clear();
fMCMCprobMax.clear();
fMCMCNIterationsConvergenceGlobal = -1;
fMCMCRValueParameters.clear();
for (int i = 0; i < int(fMCMCH1Marginalized.size()); ++i)
if (fMCMCH1Marginalized[i])
delete fMCMCH1Marginalized[i];
for (int i = 0; i < int(fMCMCH2Marginalized.size()); ++i)
if (fMCMCH2Marginalized[i])
delete fMCMCH2Marginalized[i];
// clear plots
fMCMCH1Marginalized.clear();
fMCMCH2Marginalized.clear();
// reset flags
fMCMCFlagPreRun = false;
fMCMCFlagRun = false;
fMCMCFlagConvergenceGlobal = false;
// no errors
return 1;
}
| void BCEngineMCMC::MCMCResetRunStatistics | ( | ) |
Definition at line 1344 of file BCEngineMCMC.cxx.
{
for (int j = 0; j < fMCMCNChains; ++j)
{
fMCMCNIterations[j] = 0;
fMCMCNTrialsTrue[j] = 0;
fMCMCNTrialsFalse[j] = 0;
fMCMCprobMean[j] = 0;
fMCMCprobVar[j] = 0;
for (int k = 0; k < fMCMCNParameters; ++k)
{
fMCMCNTrialsTrue[j * fMCMCNParameters + k] = 0;
fMCMCNTrialsFalse[j * fMCMCNParameters + k] = 0;
}
}
// reset marginalized distributions
for (int i = 0; i < int(fMCMCH1Marginalized.size()); ++i)
if (fMCMCH1Marginalized[i])
fMCMCH1Marginalized[i]->Reset();
for (int i = 0; i < int(fMCMCH2Marginalized.size()); ++i)
if (fMCMCH2Marginalized[i])
fMCMCH2Marginalized[i]->Reset();
fMCMCRValue = 100;
}
| void BCEngineMCMC::MCMCSetFlagFillHistograms | ( | bool | flag | ) |
Definition at line 291 of file BCEngineMCMC.cxx.
{
fMCMCFlagFillHistograms = flag;
for (int i = 0; i < fMCMCNParameters; ++i)
fMCMCFlagsFillHistograms[i] = flag;
}
| void BCEngineMCMC::MCMCSetFlagFillHistograms | ( | int | index, | |
| bool | flag | |||
| ) |
Definition at line 300 of file BCEngineMCMC.cxx.
{
// check if index is within range
if (index < 0 || index > fMCMCNParameters)
{
BCLog::OutWarning("BCEngineMCMC :MCMCSetFlagFillHistograms. Index out of range.");
return;
}
// set flag
fMCMCFlagsFillHistograms[index] = flag;
}
| void BCEngineMCMC::MCMCSetFlagInitialPosition | ( | int | flag | ) | [inline] |
Definition at line 356 of file BCEngineMCMC.h.
{ fMCMCFlagInitialPosition = flag; };
| void BCEngineMCMC::MCMCSetFlagOrderParameters | ( | bool | flag | ) | [inline] |
Definition at line 362 of file BCEngineMCMC.h.
{ fMCMCFlagOrderParameters = flag; };
| void BCEngineMCMC::MCMCSetInitialPositions | ( | std::vector< std::vector< double > > | x0s | ) |
Definition at line 277 of file BCEngineMCMC.cxx.
{
// create new vector
std::vector <double> y0s;
// loop over vector elements
for (int i = 0; i < int(x0s.size()); ++i)
for (int j = 0; j < int((x0s.at(i)).size()); ++j)
y0s.push_back((x0s.at(i)).at(j));
this->MCMCSetInitialPositions(y0s);
}
| void BCEngineMCMC::MCMCSetInitialPositions | ( | std::vector< double > | x0s | ) |
Definition at line 261 of file BCEngineMCMC.cxx.
{
// clear the existing initial position vector
fMCMCInitialPosition.clear();
// copy the initial positions
int n = int(x0s.size());
for (int i = 0; i < n; ++i)
fMCMCInitialPosition.push_back(x0s.at(i));
// use these intial positions for the Markov chain
this->MCMCSetFlagInitialPosition(2);
}
| void BCEngineMCMC::MCMCSetMarkovChainTrees | ( | std::vector< TTree * > | trees | ) |
Definition at line 314 of file BCEngineMCMC.cxx.
{
// clear vector
fMCMCTrees.clear();
// copy tree
for (int i = 0; i < int(trees.size()); ++i)
fMCMCTrees.push_back(trees[i]);
}
| void BCEngineMCMC::MCMCSetMaximumEfficiency | ( | double | efficiency | ) | [inline] |
Definition at line 331 of file BCEngineMCMC.h.
{ fMCMCEfficiencyMax = efficiency; };
| void BCEngineMCMC::MCMCSetMinimumEfficiency | ( | double | efficiency | ) | [inline] |
Definition at line 326 of file BCEngineMCMC.h.
{ fMCMCEfficiencyMin = efficiency; };
| void BCEngineMCMC::MCMCSetNChains | ( | int | n | ) |
Definition at line 252 of file BCEngineMCMC.cxx.
{
fMCMCNChains = n;
// re-initialize
this->MCMCInitialize();
}
| void BCEngineMCMC::MCMCSetNIterationsMax | ( | int | n | ) | [inline] |
Definition at line 296 of file BCEngineMCMC.h.
{ fMCMCNIterationsMax = n; };
| void BCEngineMCMC::MCMCSetNIterationsPreRunMin | ( | int | n | ) | [inline] |
Definition at line 306 of file BCEngineMCMC.h.
{ fMCMCNIterationsPreRunMin = n; };
| void BCEngineMCMC::MCMCSetNIterationsRun | ( | int | n | ) | [inline] |
Definition at line 301 of file BCEngineMCMC.h.
{ fMCMCNIterationsRun = n; };
| void BCEngineMCMC::MCMCSetNIterationsUpdate | ( | int | n | ) | [inline] |
Definition at line 313 of file BCEngineMCMC.h.
{ fMCMCNIterationsUpdate = n; };
| void BCEngineMCMC::MCMCSetNIterationsUpdateMax | ( | int | n | ) | [inline] |
Definition at line 321 of file BCEngineMCMC.h.
{ fMCMCNIterationsUpdateMax = n; };
| void BCEngineMCMC::MCMCSetNLag | ( | int | n | ) | [inline] |
Definition at line 291 of file BCEngineMCMC.h.
{ fMCMCNLag = n; };
| void BCEngineMCMC::MCMCSetPrecision | ( | BCEngineMCMC::Precision | precision | ) |
Set the precision for the MCMC run.
Definition at line 104 of file BCEngineMCMC.cxx.
{
switch(precision) {
case BCEngineMCMC::kLow:
fMCMCNChains = 1;
fMCMCNLag = 1;
fMCMCNIterationsMax = 10000;
fMCMCNIterationsRun = 10000;
fMCMCNIterationsPreRunMin = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCRValue = 100;
break;
case BCEngineMCMC::kMedium:
fMCMCNChains = 5;
fMCMCNLag = 1;
fMCMCNIterationsMax = 100000;
fMCMCNIterationsRun = 100000;
fMCMCNIterationsPreRunMin = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCRValue = 100;
break;
case BCEngineMCMC::kHigh:
fMCMCNChains = 10;
fMCMCNLag = 10;
fMCMCNIterationsMax = 1000000;
fMCMCNIterationsRun = 1000000;
fMCMCNIterationsPreRunMin = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCRValue = 100;
break;
case BCEngineMCMC::kVeryHigh:
fMCMCNChains = 10;
fMCMCNLag = 10;
fMCMCNIterationsMax = 10000000;
fMCMCNIterationsRun = 10000000;
fMCMCNIterationsPreRunMin = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCRValue = 100;
break;
}
// re-initialize
MCMCInitialize();
}
| void BCEngineMCMC::MCMCSetRValueCriterion | ( | double | r | ) | [inline] |
Definition at line 373 of file BCEngineMCMC.h.
{ fMCMCRValueCriterion = r; };
| void BCEngineMCMC::MCMCSetRValueParametersCriterion | ( | double | r | ) | [inline] |
Definition at line 378 of file BCEngineMCMC.h.
{ fMCMCRValueParametersCriterion = r; };
| void BCEngineMCMC::MCMCSetTrialFunctionScaleFactor | ( | std::vector< double > | scale | ) | [inline] |
Definition at line 282 of file BCEngineMCMC.h.
{ fMCMCTrialFunctionScaleFactorStart = scale; };
| void BCEngineMCMC::MCMCSetValuesDefault | ( | ) |
Definition at line 45 of file BCEngineMCMC.cxx.
{
fMCMCNParameters = 0;
fMCMCFlagWriteChainToFile = false;
fMCMCFlagWritePreRunToFile = false;
fMCMCFlagPreRun = false;
fMCMCFlagRun = false;
fMCMCFlagFillHistograms = true;
fMCMCEfficiencyMin = 0.15;
fMCMCEfficiencyMax = 0.50;
fMCMCFlagInitialPosition = 1;
fMCMCNLag = 1;
fMCMCCurrentIteration = -1;
fMCMCCurrentChain = -1;
this->MCMCSetValuesDetail();
}
| void BCEngineMCMC::MCMCSetValuesDetail | ( | ) |
Definition at line 84 of file BCEngineMCMC.cxx.
{
fMCMCNChains = 5;
fMCMCNIterationsMax = 1000000;
fMCMCNIterationsRun = 100000;
fMCMCNIterationsPreRunMin = 500;
fMCMCFlagInitialPosition = 1;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCNIterationsConvergenceGlobal = -1;
fMCMCFlagConvergenceGlobal = false;
fMCMCRValue = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCFlagOrderParameters = true;
fMCMCCurrentIteration = -1;
fMCMCCurrentChain = -1;
}
| void BCEngineMCMC::MCMCSetValuesQuick | ( | ) |
Definition at line 64 of file BCEngineMCMC.cxx.
{
fMCMCNChains = 1;
fMCMCNIterationsMax = 1000;
fMCMCNIterationsRun = 10000;
fMCMCNIterationsPreRunMin = 0;
fMCMCFlagInitialPosition = 1;
fMCMCRValueCriterion = 0.1;
fMCMCRValueParametersCriterion = 0.1;
fMCMCNIterationsConvergenceGlobal = -1;
fMCMCFlagConvergenceGlobal = false;
fMCMCRValue = 100;
fMCMCNIterationsUpdate = 1000;
fMCMCNIterationsUpdateMax = 10000;
fMCMCFlagOrderParameters = true;
fMCMCCurrentIteration = -1;
fMCMCCurrentChain = -1;
}
| void BCEngineMCMC::MCMCSetWriteChainToFile | ( | bool | flag | ) | [inline] |
Definition at line 336 of file BCEngineMCMC.h.
{ fMCMCFlagWriteChainToFile = flag; };
| void BCEngineMCMC::MCMCSetWritePreRunToFile | ( | bool | flag | ) | [inline] |
Definition at line 341 of file BCEngineMCMC.h.
{ fMCMCFlagWritePreRunToFile = flag; };
| void BCEngineMCMC::MCMCTrialFunction | ( | int | ichain, | |
| std::vector< double > & | x | |||
| ) | [virtual] |
Definition at line 351 of file BCEngineMCMC.cxx.
{
// call MCMCTrialFunctionSingle() for all parameters by default
for (int i = 0; i < fMCMCNParameters; ++i)
x[i] = MCMCTrialFunctionSingle(ichain, i);
}
| double BCEngineMCMC::MCMCTrialFunctionSingle | ( | int | ichain, | |
| int | ipar | |||
| ) | [virtual] |
Definition at line 359 of file BCEngineMCMC.cxx.
{
// no check of range for performance reasons
// use uniform distribution
// return = fMCMCTrialFunctionScaleFactor[ichain * fMCMCNParameters + iparameter] * 2.0 * (0.5 - fRandom->Rndm());
// Breit-Wigner width adjustable width
return fRandom->BreitWigner(0.0, fMCMCTrialFunctionScaleFactor[ichain * fMCMCNParameters + iparameter]);
}
| BCEngineMCMC & BCEngineMCMC::operator= | ( | const BCEngineMCMC & | engineMCMC | ) |
Defaut assignment operator
Definition at line 188 of file BCEngineMCMC.cxx.
{
if (this != &enginemcmc)
enginemcmc.Copy(* this);
return * this;
}
| int BCEngineMCMC::SetMarginalized | ( | int | index, | |
| TH1D * | h | |||
| ) |
Definition at line 1553 of file BCEngineMCMC.cxx.
{
if((int)fMCMCH1Marginalized.size()<=index)
return 0;
if(h==0)
return 0;
if((int)fMCMCH1Marginalized.size()==index)
fMCMCH1Marginalized.push_back(h);
else
fMCMCH1Marginalized[index]=h;
return index;
}
| int BCEngineMCMC::SetMarginalized | ( | int | index1, | |
| int | index2, | |||
| TH2D * | h | |||
| ) |
Definition at line 1570 of file BCEngineMCMC.cxx.
{
int counter = 0;
int index = 0;
// search for correct combination
for(int i = 0; i < fMCMCNParameters; i++)
for (int j = 0; j < i; ++j)
{
if(j == index1 && i == index2)
index = counter;
counter++;
}
if((int)fMCMCH2Marginalized.size()<=index)
return 0;
if(h==0)
return 0;
if((int)fMCMCH2Marginalized.size()==index)
fMCMCH2Marginalized.push_back(h);
else
fMCMCH2Marginalized[index]=h;
return index;
}
Member Data Documentation
std::vector<double> BCEngineMCMC::fMCMCBoundaryMax [protected] |
Definition at line 562 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCBoundaryMin [protected] |
Definition at line 561 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCCurrentChain [protected] |
Definition at line 589 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCCurrentIteration [protected] |
Definition at line 584 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCCycle [protected] |
Definition at line 695 of file BCEngineMCMC.h.
double BCEngineMCMC::fMCMCEfficiencyMax [protected] |
Definition at line 669 of file BCEngineMCMC.h.
double BCEngineMCMC::fMCMCEfficiencyMin [protected] |
Definition at line 665 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagConvergenceGlobal [protected] |
Definition at line 606 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagFillHistograms [protected] |
Definition at line 684 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCFlagInitialPosition [protected] |
Definition at line 675 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagOrderParameters [protected] |
Definition at line 680 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagPreRun [protected] |
Definition at line 650 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagRun [protected] |
Definition at line 654 of file BCEngineMCMC.h.
std::vector<bool> BCEngineMCMC::fMCMCFlagsFillHistograms [protected] |
Definition at line 566 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagWriteChainToFile [protected] |
Definition at line 632 of file BCEngineMCMC.h.
bool BCEngineMCMC::fMCMCFlagWritePreRunToFile [protected] |
Definition at line 636 of file BCEngineMCMC.h.
std::vector<TH1D *> BCEngineMCMC::fMCMCH1Marginalized [protected] |
Definition at line 769 of file BCEngineMCMC.h.
std::vector<int> BCEngineMCMC::fMCMCH1NBins [protected] |
Definition at line 765 of file BCEngineMCMC.h.
std::vector<TH2D *> BCEngineMCMC::fMCMCH2Marginalized [protected] |
Definition at line 770 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCInitialPosition [protected] |
Definition at line 661 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNChains [protected] |
Definition at line 570 of file BCEngineMCMC.h.
std::vector<int> BCEngineMCMC::fMCMCNIterations [protected] |
Definition at line 579 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsConvergenceGlobal [protected] |
Definition at line 602 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsMax [protected] |
Definition at line 610 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsPreRunMin [protected] |
Definition at line 618 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsRun [protected] |
Definition at line 614 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsUpdate [protected] |
Definition at line 593 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNIterationsUpdateMax [protected] |
Definition at line 597 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNLag [protected] |
Definition at line 574 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCNParameters [protected] |
Definition at line 557 of file BCEngineMCMC.h.
std::vector<int> BCEngineMCMC::fMCMCNTrialsFalse [protected] |
Definition at line 628 of file BCEngineMCMC.h.
std::vector<int> BCEngineMCMC::fMCMCNTrialsTrue [protected] |
Definition at line 623 of file BCEngineMCMC.h.
int BCEngineMCMC::fMCMCPhase [protected] |
Definition at line 690 of file BCEngineMCMC.h.
Definition at line 551 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCprob [protected] |
Definition at line 727 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCprobMax [protected] |
Definition at line 732 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCprobMean [protected] |
Definition at line 737 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCprobVar [protected] |
Definition at line 742 of file BCEngineMCMC.h.
double BCEngineMCMC::fMCMCRValue [protected] |
Definition at line 754 of file BCEngineMCMC.h.
double BCEngineMCMC::fMCMCRValueCriterion [protected] |
Definition at line 746 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCRValueParameters [protected] |
Definition at line 757 of file BCEngineMCMC.h.
double BCEngineMCMC::fMCMCRValueParametersCriterion [protected] |
Definition at line 750 of file BCEngineMCMC.h.
std::vector<TTree *> BCEngineMCMC::fMCMCTrees [protected] |
Definition at line 775 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCTrialFunctionScaleFactor [protected] |
Definition at line 641 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCTrialFunctionScaleFactorStart [protected] |
Definition at line 646 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCx [protected] |
Definition at line 702 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCxLocal [protected] |
Definition at line 722 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCxMax [protected] |
Definition at line 708 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCxMean [protected] |
Definition at line 713 of file BCEngineMCMC.h.
std::vector<double> BCEngineMCMC::fMCMCxVar [protected] |
Definition at line 718 of file BCEngineMCMC.h.
TRandom3* BCEngineMCMC::fRandom [protected] |
Definition at line 761 of file BCEngineMCMC.h.
The documentation for this class was generated from the following files:
